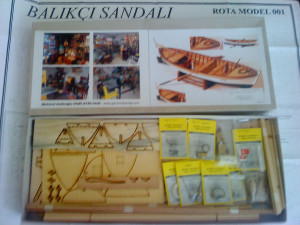
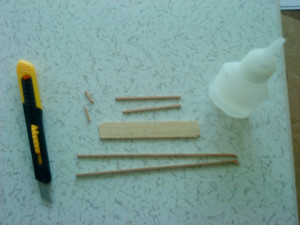
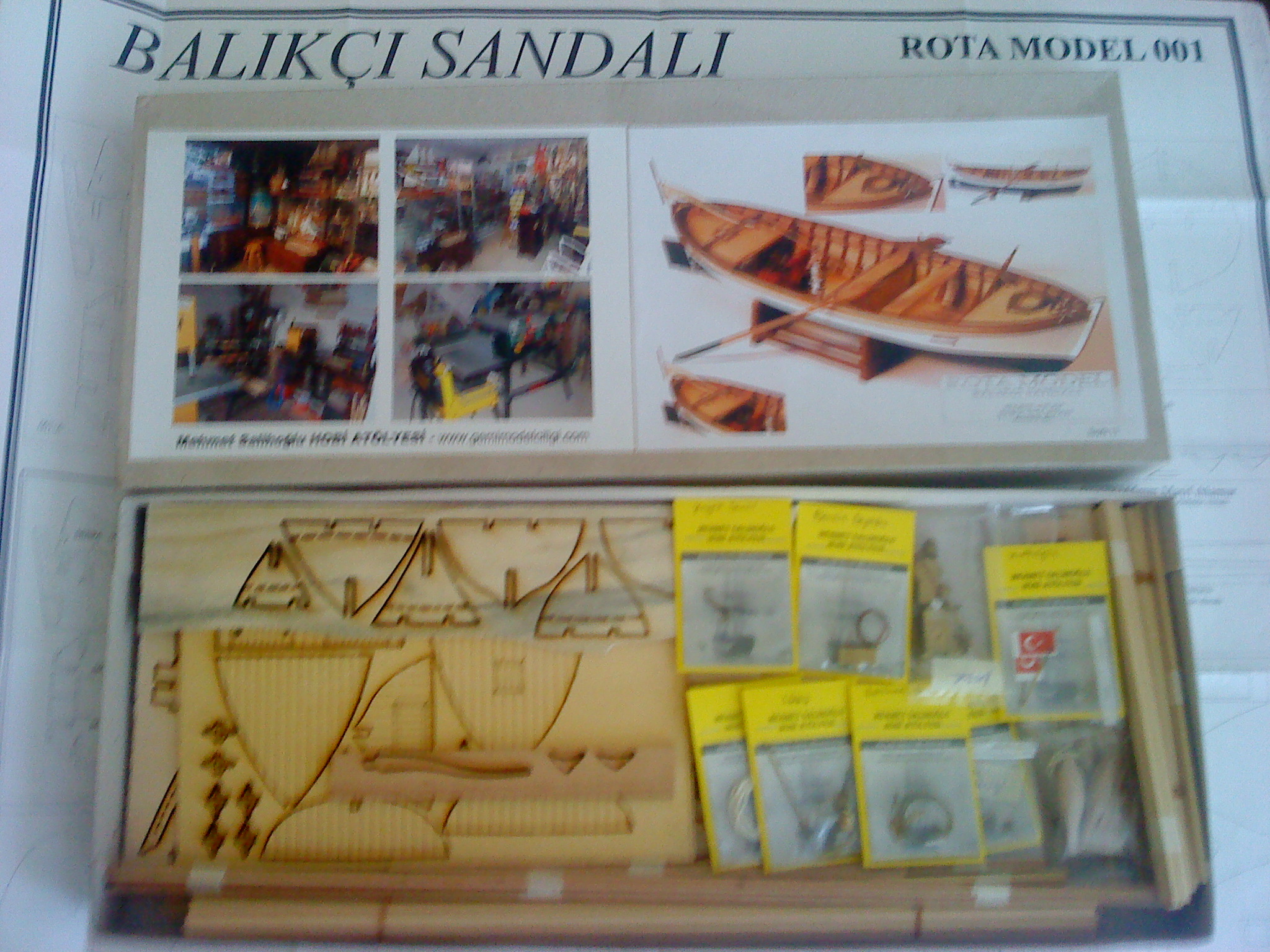
Ve sonunda gemi modelime kavuştum. Aşağıda kutu içeriği bulunmaktadır. Elimden geldiğince yapım aşamalarını anlatacağım.




Kutu içerisinden çıkmayan montaj aşamasında gerekli alet ve edevat : Hafif bir çekiç , bir miktar toplu iğne(çelik olmasın),bir sivri uçlu bir sürgülü maket bıçağı, bir elektronikçi tipi kargaburun, parmaklarınız arasında, veya yuvarlatılmış bir tahta parçasına tersten saplayarak kullanacağınız 1–1,5–2mm. matkaplar, sivri uçlu hassas bir cımbız, düzgün birkaç tahta parçasına yapıştırılarak hazırlanmış değişik kumlarda zımpara takozları modelimiz inşaatı için bize yeterli olacaktır.
YAPIM KILAVUZU

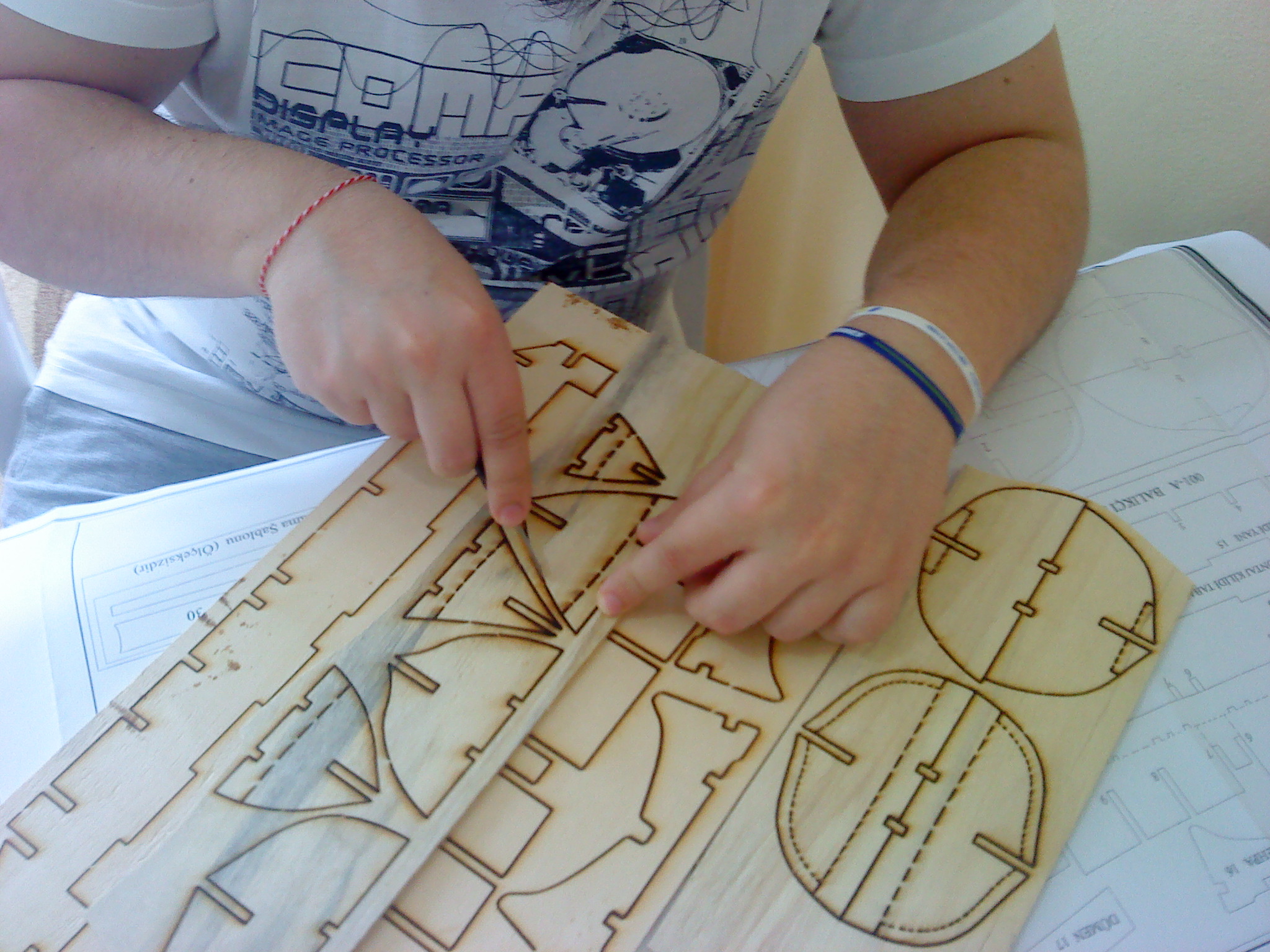
AŞAMA 1 : Herhangi bir karışıklığa meydan vermemek için, modelimizin parçalarını yerlerinden ayırmadan önce, plandaki numaralama kılavuzuna bakarak üzerlerine kurşun kalem ile parça numaralarını yazıyoruz.
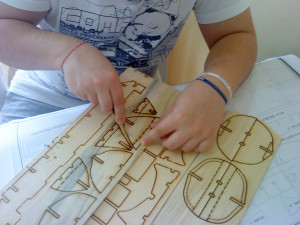
AŞAMA 2 : Bir maket bıçağı yardımıyla, parçaların kutulamada dağılmaması için bırakılan köprüleri kesiniz.Asla bu köprüleri kesmeden,parçaları ; kırarak yerlerinden ayırmaya çalışmayınız


AŞAMA 3: Lazer kesimde kesilmemiş kısımlar kıl testere ile kesilir. Kesilen parçaların pürüzleri ince zımpara ile giderilir.

AŞAMA 4 : Kontraplağın kesim kenarlarının gizlenmesi için, omurganın alt ve bodoslama kısımlarını, 1X4mm. gürgen çıta ile kaplayın ve yanlarda oluşabilecek taşmaları bir zımpara takozu ile tesviye edin.
AŞAMA 5 : Omurga üzerindeki sarma çıtası kanallarını 45 derecelik bir açı ile kanal açılır.

AŞAMA 6 : Montaj kilitlerini paralel ve dikliklerine dikkat ederek baş ve kıç bodoslama koruyucuları yardımıyla kurulumunu yapıp daha sonra baş ve kıç bodoslama koruyucularını yerlerine yapıştırıyoruz.

AŞAMA 7 : Postaları, montaj kilidinin üstüne numara sıralamasına dikkat ederek dizin ve omurgayı üzerine geçirin.


AŞAMA 8: Japon yapıştırıcı yardımıyla postaları omurgaya sabitliyoruz.

AŞAMA 9 : Postaların üzerinde, kırılıp sökülecek bölümleri tespit edip, bu bölümleri “boya maskeleme bandı ” ile bantlayınız

AŞAMA 10 : Omurgaları sabitleyip, kırılıp sökülecek bölümleri bant ile sardıktan sonra modelin sarım işlemine geçebiliriz.
Sarma çıtalarını pek yumuşak olmayan bir tahta parçası üzerinde ağır ağır kaydırırken küçük bir çekiç ile hafifçe döverek çıtalara sarmak için gerekli olan eğimi veririz.
Çıtaların omurgaya karşılık gelmesi için 45 derecelik açı ile tesviye ederiz.
ilk sıradaki sarma çıtalarını başlangıç kısmını yapıştırdıktan sonra postaların üzerine gelen kısmı yapıştıramayacağımız için toplu iğne ile tutturuyoruz.
Sarma işlemimizin kolay olması için borda çıtalarını 2 parça halinde montaj yapıyoruz. yani baştan 7. postaya kıçtan 7. postaya kadar birleştiriyoruz. Daha sağlam olması için bu işlemi bir alt sırada 6 nolu posta da birleştirirek , geminin esnemesine engel olmak için bir sancak bir iskele şeklinde sarım işlemini bitiriyoruz




AŞAMA 11 : Sarma işlemi bittikten sonra zımpara takozu ile kaba tesviye yapılır, cam kırıklarıyla tesviyeye devam edilir , en sonunda ince zımpara ile tamamlanır.


AŞAMA 12: Hem pürüzsüz yüzey hem de modeli sağlamlaştırmak için tutkallanır.

AŞAMA 13: Artık modelin destek bölümleri sökülebilir

AŞAMA 14: Bir kerpeten yardımıyla sökülecek kısımları söküyoruz

AŞAMA 15: Parçalar söküldükten sonra, kalan tahta ve tutkal artıklarını da temizleyip modelin içten tesviyesini yapıyoruz

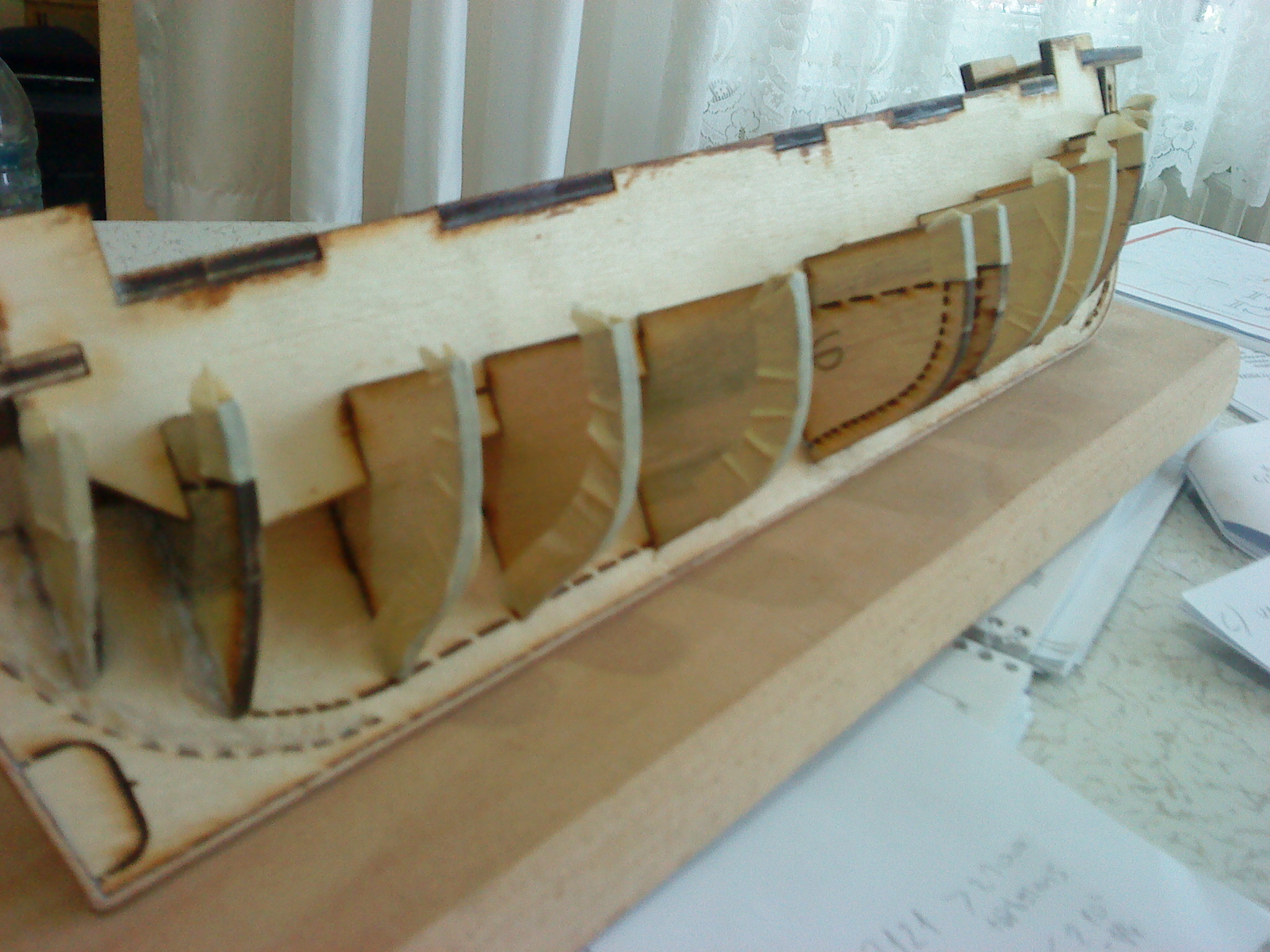
AŞAMA 16: Sökülecek parçalar söküldükten sonra aşağıdaki gibi bir görüntü elde edilmelidir.
AŞAMA 17: 6. ve 7. postalar 1x6mm çıta ile 20 no’lu livar yan duvarları kaplanır yerine montajı yapılır.
26 no’lu parça 1x6mm çıta ile kaplanır ve yerine montajı yapılır. Livar kapaklarını açılır kapanır yapmak için kesiyoruz. ve yerlerine uyması için tesviye ediyoruz.


AŞAMA 18: Baş altı kapağını açık yapmak için 10 no’lu postanın ortasındaki yuvarlak kısmı boşaltıyoruz. Boşalttığımız yere kasa yapılır ve menteşe ile açılır kapanır hale getirilir aynı işlemi de kıç üstü parçasına da yapıyoruz.


AŞAMA 19: Montaj ayaklarını, 16 no’lu kalastıra parçalarını 4 adet 5x5mm çıtalar ile birleştiriyoruz bu işlemi yaparken geminin gövdesini ölçek alıyoruz. ve yapıştırıyoruz

AŞAMA 20: Fazla kısımları kesip, ince zımpara ile tesviye ediyoruz.


AŞAMA 21: Plan incelenerek eğrilerin yerleri belirlenir ve 2x2mm lik çıtalar ile yerlerine montajı yapılır. Uzun bir zımpara takozu ile tesviye yapılır.

AŞAMA 22: Daha önce alıştırma yaptığımız baş üstü ve kıç üstü parçalarını yerine monte ediyoruz.

AŞAMA 23:2x1mm lik küpeşte iç trizleri baş ve kıç güverteye şekildeki gibi monte edilir


AŞAMA 24: Eğrilerin üzerine gelecek şekilde baştan kıça kadar 2x2mm çıta montajı hem sancak hem de iskele tarafına yapılır.

AŞAMA 25: Güverte hizasından oturağa kadar takviye çıtaları konulur

AŞAMA 26: 2x2mm lik yumru çıtaları montajı yapılmadan önce zımpara ile dış kısımları yuvarlatılır ve 4 adet parça hazırlanılır. Dış kaplamanın en üst hizasından baştan kıça kadar yumru çıtalarının montajı aralarında biraz boşluk bırakılarak altlı üstlü yapılır. Bu işlem iskele sancak olarak her iki tarafa da uygulanır.

AŞAMA 27: Baş ve kıç kucaklama paraçoları önce yuvarlak bir zımpara takozu ile iç bükey olarak işlenir, sonra küpeştelerin hizasına göre hafifçe dışarı taşılarak yerlerine yapıştırılır.

AŞAMA 28: Plandan da inceleyerek 3x4mm, çıtadan ıskarmoz yastıklarını, 1x2mm den ıskarmoz destek çıtalarını ve 1mm çap yuvarlak çıtadan ıskarmozları hazırlayıp yerlerine yapıştırıyoruz


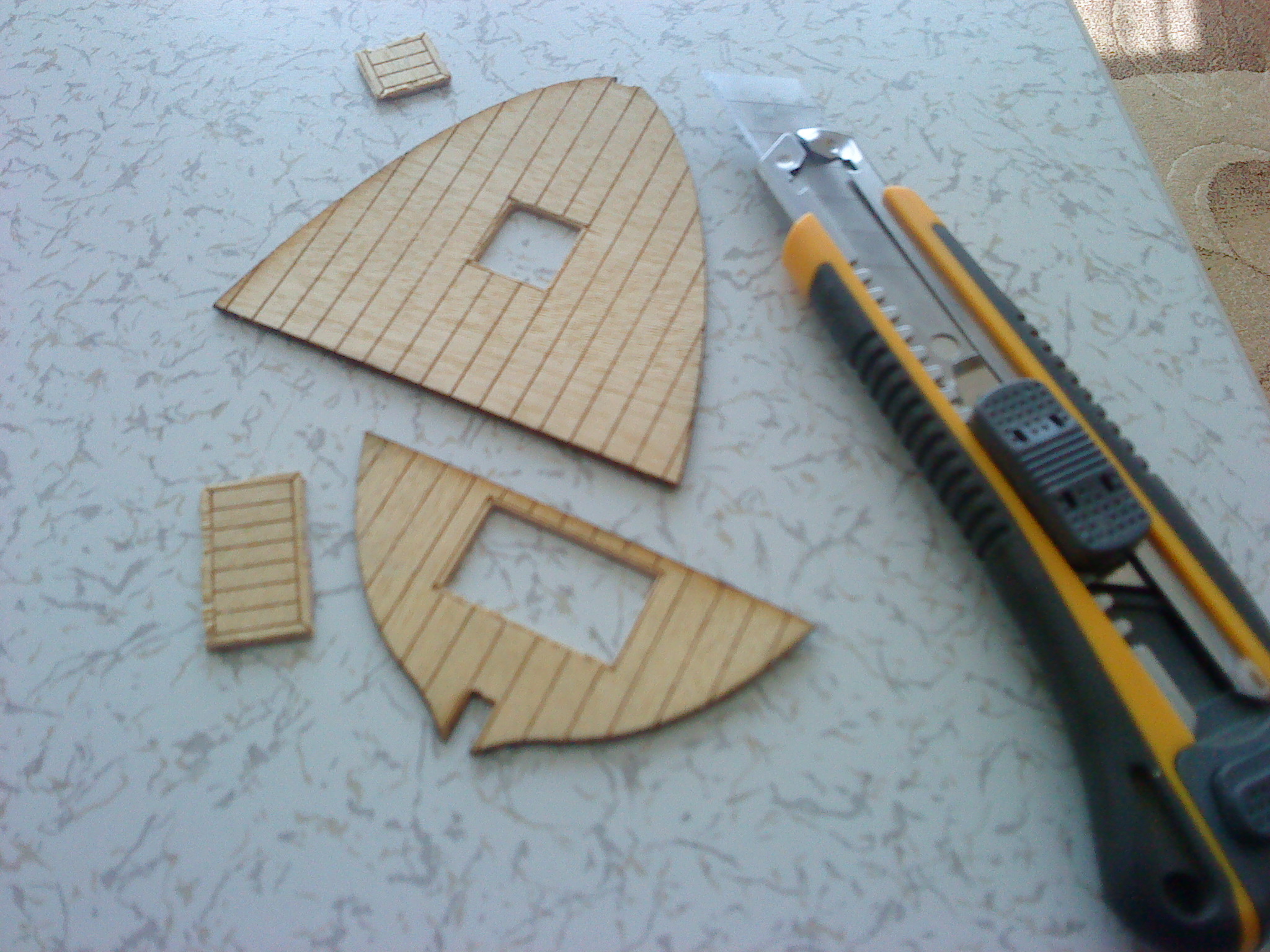
AŞAMA 29: Farş tahtalarının hazırlanışı: Planda verilmiş şablonlar yağlı kağıda aktarılır daha sonra farş tahtalarının üzerine konularak markalanır ve kesilir. ince zımpara ile tesviye edilir. 2x2mm lik çıtalar ile resme göre montajı yapılır


AŞAMA 30: 5x5mm lik çıtalardan motor kızaklarını plana göre işliyoruz ve montajını yapıyoruz.

AŞAMA 31: 2x17mm çıtadan oturak tahtası, 3x3mm den ayak tahtasını ve 1x4mm den desteklerini işleyerek yerlerine yapıştırıyoruz


AŞAMA 32: 1x6mm çıtadan plana uygun boyda 2 parça dümen yan parçası kesiyoruz. Dümen palasının yeke geçmesi boşluğunu yerinden çıkarıyoruz , dümen yan parçalarından birini yerine yapıştırıyoruz, dümen palasını yerinden çıkarıp diğer yüzünden de ikinci yan parçayı yapıştırıyoruz, yekeyi zımparalayıp tesviye ederek yerine alıştırıyoruz.



AŞAMA 33: Kürek palalarını kitten söküp ayırıyoruz. 1mm lik matkap ile kürek topacını deliyoruz aynı şekilde kürek palasını da deliyoruz. 3mm çap ile başlarını yuvarlıyoruz . Açtığımız deliğe pimleri yerleştiriyoruz ve birleştiriyoruz. Zımpara ile pürüzleri gideriyoruz. Iskarmoz ipini bağlıyoruz.




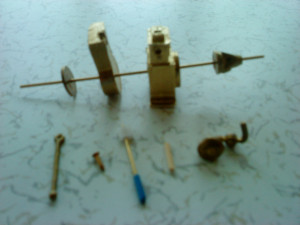
AŞAMA 34: Wısconsın motorun montajı fotoğraftaki sıraya göre yapılır



AŞAMA 35: Dümen boşluğu kıl testere yardımıyla açılır ve pervanenin montajı yapılır



AŞAMA 36: Gemi modeli ve donanım malzemesi verniklenir.


AŞAMA 37: Kakıç montajı yapılır


AŞAMA 38: Bodoslama demirinin montajı yapılır


AŞAMA 39: Kayna demiri montajı iskele ve sancak taraflarına montaj yapılır

AŞAMA 40: Lüks montajı yapılarak yerine monte edilir


AŞAMA 41: Tulumbanın montajı yapılır

AŞAMA 42: İskele sancak baş ve kıç olmak üzere 4 tane kurt ağzının montajı yapılır

AŞAMA 43: Benzin deposunun montajı yapılır

AŞAMA 44: Egzoz montajı yapıldıktan sonra motor yerine yerleştirilir

AŞAMA 45: Hareketli dümen montajı yapılır

Gemi Modelimiz Artık Hazır















































































{kind=link}
{kind=link}